







Конструктор Yahboom ROS Transbot Robot (без контроллера Jetson Nano)
Технические характеристики Yahboom ROS Transbot Robot
| Особенности | передача видео в реальном времени, автопилот, отслеживание объектов, распознавание лиц, отслеживание цвета, обнаружение краёв и автоматическое избегание столкновения |
| Характеристики камеры Astra Pro Depth | |
| Точность | 1 м: ± 3 мм |
| Разрешение | 1280 x 1024 @ 7 fps 640 x 480 @ 30 fps 320 x 240 @ 30 fps 160 x 120 @ 30 fps |
| Чип обработки | MX400 |
| Поле зрения | H 58.4° x V 45.7° |
| Поле зрения RGB | H 66.10° x V 40.2° |
| Дальность | 0.6 - 8 м |
| Потребляемая мощность | <2.5 Вт |
| Характеристики лидара | |
| Модель | A1M8 |
| Сценарий работы | сканирование и позиционирование внутри помещений |
| Угловое разрешение | <1° |
| Ток питания | 100 мА |
| Напряжение | 5 В |
| Потребление электроэнергии | 0.5 Вт |
| Радиус сканирования | 360° |
| Радиус измерения | 0.15 м - 12 м |
| Частота сканирования | 5.5 Гц - 10 Гц |
| Точность измерения | ±1% (≤ 3м) ±2% (≤ 3 - 5м) ±2.5% (≥ 5м) |
| Характеристики манипулятора | |
| Максимальный угол | 300° ±15° |
| Напряжение | 6 - 7.4 В |
| Крутящий момент | 15 кг*с*см / 7.4 В |
| Скорость реакции | 0.3 сек / 60° 7.4 В |
| Тип сервопривода | сервопривод последовательной шины |
| Вес | 50 г |
| Характеристики мотора | |
| Тип мотора | щеточный, с постоянным магнитом |
| Напряжение | 12 В |
| Мощность | < 4 Вт |
| Ток | 0.3 А |
| Передаточное число двигателя | 1:56 |
| Крутящий момент при заблокированном роторе | 8.3 кгФ*см |
| Крутящий момент | 6.5 кгФ*см |
| Cкорость перед замедлением | 12000 об/мин |
| Скорость после замедления | 205 ±10 об/мин |
| Выходной вал | D-образный, 6 мм диаметр |
| Количество строк | 11 |
| Тип интерфейса | PH 2.0 |
| Характеристики батареи | |
| Емкость | 4400 мАч |
| Номинальный ток разряда | 8.8 А |
| Максимальный ток разряда | 10 А |
| Защита | от перегрузки, короткого замыкания |
| Размер | 68 x 55 x 37 мм |
| Вес | 300 г |
| Зарядное устройство | 12.6 В, 800 мА |
| Общие характеристики | |
| Материал корпуса | алюминий |
| Питание | 2 аккумуляторные батареи 4400 мАч (12,6 В) |
| Время работы | ~ 120 мин |
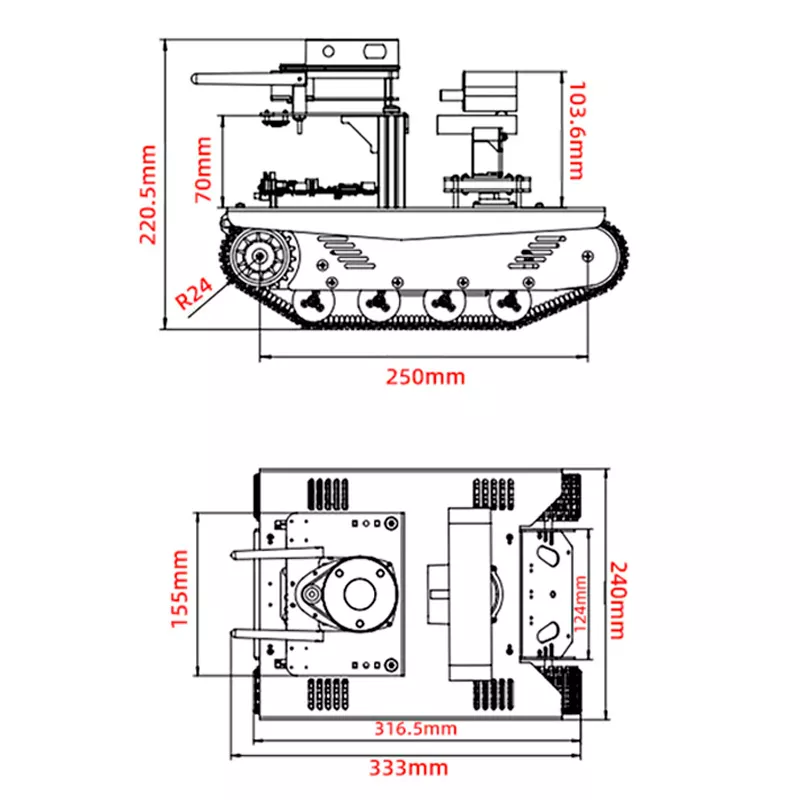
| Габариты | 180 мм x 172 мм x 210 мм |
| Вес брутто | 7,9 кг |
| Совместимость | Микрокомпьютер Jetson Nano 4GB Developer Kit (SUB) |
| Комплектация | |
| шасси - 1 шт | |
| плата расширения – 1 шт | |
| крепление для лидара - 1 шт | |
| | джойстик - 1 шт |
| держатель для мобильного телефона - 1 шт | |
| зарядное устройство - 1 шт | |
| кабели – 1 комплект | |
| кабель microUSB – 1 шт | |
| кабельный хомут – 1 шт | |
| отвертка – 1 шт | |
| механический код и шашечная бумага – 1 шт | |
| комплект деталей - 3 комплекта | |
| oled экран - 1 шт | |
| | батарейный блок - 1 шт |
| батарейный корпус - 1 шт | |
| | кабель MicroUSB - 1 шт |
| | лидар - 1 шт |
| | камера глубины Astra Pro Depth - 1 шт |
| | опора камеры глубины - 1 шт |
| фиксированный кронштейн для камеры глубины - 1 шт | |
| | манипулятор - 1 шт |
| | быстросъемный фиксатор - 1 шт |
| крепежная пластина - 1 шт | |
| руководство по эксплуатации – 1 шт | |
| упаковочная коробка - 1 шт | |
Обратите внимание: плата Jetson Nano в комплект не входит.
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки.
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микрокомпьютера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Конструктор - танк Yahboom ROS Transbot Robot
Конструктор Yahboom ROS Transbot Robot предоставляет возможности для реализации сложных задач в робототехнике, от распознавания лиц до автономной навигации. Платформа совместима с ROS, что открывает доступ к уже существующим решениям и библиотекам для разработки алгоритмов автономного передвижения, распознавания объектов и обработки данных. Преимущество Transbot — работа с искусственным интеллектом (при добавлении контроллера Jetson Nano), что делает его подходящим для сложных робототехнических проектов.
Камера глубины Astra Pro осуществляет отслеживания объектов, распознавания лиц и предотвращения столкновений. Дальность камеры до 8 метров позволяет получать подробности о пространстве и объектах.
Лидар модели A1M8 позволяет роботу строить карту окружающей среды и определять препятствия с точностью до 1%, что делает возможным передвижение и позиционирование. Радиус сканирования до 12 метров и частота 5.5–10 Гц обеспечивают постоянное обновление данных, что помогает роботу ориентироваться в пространстве.
Ключевым компонентом робота является тип мотора — щеточный с постоянными магнитами. Мотор обладает высокой надежностью и предлагает необходимую мощность для движения и работы манипулятора, который способен вращаться на 300 и поднимать объекты.
Набор для сборки робота подходит для создания как учебных, так и профессиональных проектов, где требуется стабильная работа с возможностью интеграции параметров и быстрой настройки.
Обзорная таблица роботов Yahboom
| Характеристики | ROS Transbot Robot | ROS Transbot Robot с дисплеем и HD камерой |
| HD-камера | нет | да |
| Точность камеры Astra Pro Depth | 1 м: ± 3 мм | |
| Модель лидара | A1M8 | |
| Частота сканирования лидара | 5.5 Гц - 10 Гц | |
| Радиус измерения лидара | 0.15 м - 12 м | |
| Крутящий момент манипулятора | 15 кг*с*см / 7.4 В | |
| Тип мотора | щеточный, с постоянным магнитом | |
| Мощность мотора | < 4 Вт | |
| Емкость батареи | 4400 мАч | |
| Материал корпуса | алюминий | |
| Время работы | ~ 120 мин | |
Технические характеристики, внешний вид и комплектация товара могут быть изменены производителем без предварительного уведомления.

